- 欢迎访问牧雅阀门有限公司网站!
 耐磨陶瓷阀门、耐磨铸石阀门一站式制造商高新技术企业 国家特种设备制造许可证(TS)企业全国免费热线0577-67336222
耐磨陶瓷阀门、耐磨铸石阀门一站式制造商高新技术企业 国家特种设备制造许可证(TS)企业全国免费热线0577-67336222
1 系统硬件设计
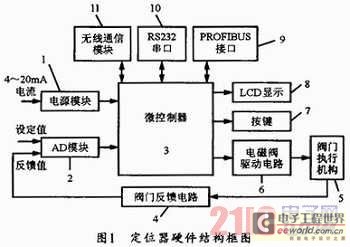
本设计中运用先进的微控制器芯片及外围扩展器件,设计具有良好性能的智能阀门定位器,对阀门的工作进行定位、监控,实现阀门的执行机构的数字化、智能化的产品要求。最终研制的产品要做到体积小、精度高、功能齐全、操作方便。本文设计的定位器的原理结构框图如图1所示。
1.1 微控制器及其外围电路设计
微控制器采用的是XC164CM单片机,它是德国英飞凌公司16位微控制器系列的第四代产品,具有运算速度快、稳定性好、电磁兼容性强的特点,适用于实时性、可靠性要求高、电磁环境复杂的应用场合。C166 V2内核采用5级指令流水线机制(外加2级预取指令流水线)。该机制使得XC164CM执行绝大多数指令平均只需一个CPU时钟周期,大大提高了微控制器的指令执行速度。C166 V2内核中的高性能16位CPU内部集成了一个乘法累加单元(MAC)。MAC单元拥有一套独立指令集,使XC164CM具有16位定点DSP的部分功能,能够在较短的时间内完成较为复杂的数字算法,例如:MAC支持单时钟周期完成乘加运算(16位x16位+32位),并能自动地以饱和的方式来防止计算结果的溢出。XC164CM在C166 V2内核的基础上扩展了丰富的片上外围子系统,能很好的满足汽车传动应用场合对各种I/O接口的需要。
1.2 电源电路
在系统电路中,逻辑电路需要5V直流电压,传感器电路、A/D、D/A、等需要5V参考基准电压,运算放大器需要±12V电压,微控制器还需要一个2.5V的内核电压,而电磁阀则需要24V电压。由于本定位器采用的是二线制低功耗设计,且定位器输入的只是一个电流信号,因此,需要将4-20mA的电流变换为所需要的电压。本实用新型中,通过电流输入转化的24V电压经过滤波电路后,提供给两个DC/DC模块,分别将电压转换为+5V和正负12V。+5V电压经过LM1117变换为+2.5V,用于微控制器的内核供电。正负12V用于给运放供电。其中正12V还用于产生+5V参考电压提供给A/D转换电路。
1.3 信号调理及ADC电路
图2为4~20mA电流信号调理电路。4~20mA信号流过120欧姆的精密采样电阻,转换成电压信号。再通过仪用放大器LT1920,输出给ADC芯片MCP3204。二极管D1可以防止电流反接。D7是一个TVS管,起着过压保护的作用。扼流圈用于抑制共模干扰。R12,R21,C10,C11,C12构成一个低通滤波网络,用于滤除高频干扰。可以看出,电路中既有共模滤波(R12/C10,R21/C12),又有差模滤波(R12+R21,C11)。滤波器的总带宽至少应为输入信号带宽的100倍。元件应对称安装在具有大面积接地面的印制电路板上,并且位置十分靠近仪用放大器的输入端,以使滤波器达到最佳性能。共模滤波的时间常数可以按如下计算:TCM=R12*C10=R21*C12。差模滤波的时间常数可以按如下公式计算:TDIFF=(R12+R21)*C11。
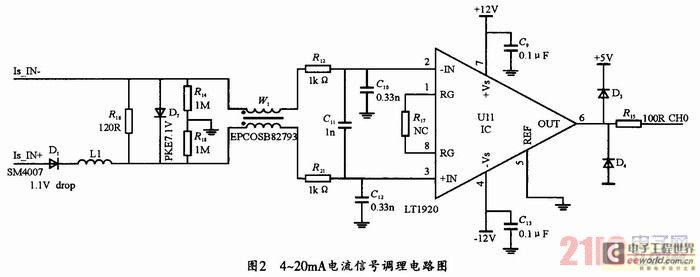
LT1920是LINEAR公司的一款高精度仪用放大器。仪用放大器是一种具有差分输入和其输出相对于参考端为单端输出的闭环增益单元。输入阻抗呈现为对称阻抗且具有较大的数值。与由接在反相输入端和输出端之间的外部电阻决定的闭环增益运算放大器不同,仪用放大器使用一个其信号和输入端隔离的内部反馈电阻网络。其增益可由外部电阻设定,典型值为1~10000。LT1920是一款低功耗、高精度的仪用放大器。
阀门的实际开度反馈信号来自于传感器接口电路。传感器采用的是高性能的导电塑料精密电位器,是具有较高分辨能力的、高可靠性的经济类型产品。传感器输入5V参考电压,输出反馈电压信号。传感器相当于一个电位器,通过电阻进行分压,所以反馈电压信号和阀门开度是线性的对应关系。
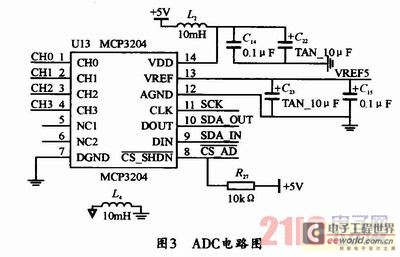
图3为ADC电路,其中AD转换芯片采用Microchip公司的12位精密ADC芯片MCP3204。MCP3204通过SSC串口和XC164CM通信。MCP3204共有4个模拟量转换通道,分别用来转换阀位反馈值、电压设定值、电流设定值等模拟量。
1.4 DAC电路
在定位器的工作中,对阀门的实际开度除了要求进行LCD显示外,有时还需要将阀门实际开度的模拟电流量送回到控制中心。位置变送器采用的是高性能导电塑料电位器,它送来的阀位反馈信号经过微处理器进行处理后,需要再经过D/A转换接口,变成电压信号,然后通过电压/电流转换电路变成电流信号输出,送往远程控制端。本设计中,新型的DAC芯片通过SSC串口和微控制器连接,用于将单片机给的数字信号转化为模拟电压信号,然后电压信号再转化为4~20mA电流信号。
2 软件设计
定位器利用闭环控制原理,将从调节器来的调节信号或直接的控制信号与从执行器来的阀门位置反馈信号相比较,根据比较后的偏差使调节阀执行机构动作,从而使阀芯准确定位,达到定位的目的。其离散PID算法的一般形式是:
Kp,KI,KD分别表示比例系数、积分系数、微分系数。新型采用模糊自适应整定PID算法原理如图4所示。
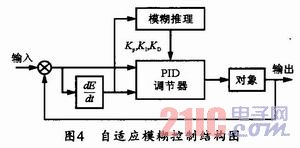
自适应模糊PID控制器以误差E和误差变化EC作为输入,可以满足不同时刻的E和EC对PID参数自整定的要求。
PID参数的整定必须考虑到在不同时刻三个参数的作用,总结工程设计人员的技术知识和实际的操作经验,就能建立针对Kp,KI,KD三个参数分别整定的模糊控制表,表1所列为Kp的模糊规则表。

模糊控制规则表建立好后,可根据如下方法进行Kp,KI,KD的自适应校正。将系统误差E和误差变化率EC变化范围定义为模糊集上的论域。

其模糊子集为:

设E,EC和Kp,KI,KD隶属度函数为三角形函数,因此可以得出各模糊子集的隶属度,根据各模糊子集的隶属度赋值表和各参数的模糊控制规则表,就可以得到各个模糊规则下的模糊关系。进而求得Kp,KI,KD的模糊子集。
根据实际情况,采用最大隶属度法进行解模糊判决。定义Kp,KI,KD参数的调整算式如下:

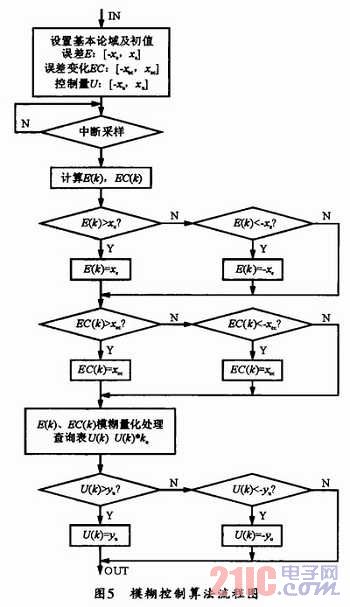
在线运行过程中,控制系统通过对模糊逻辑规则的结果处理,查表和运算,完成对PID参数的自校正,流程图如图5所示。其中:E:误差,EC:误差变化,U:控制量,kU:比例因子。
3 结束语
本文主要讨论了模糊控制算法在阀门定位器中的运用以及所用的微控制器和所涉及的外围电路设计,在工程实践中表明这些方法都是可行的。但是由于工业现场环境的干扰,控制精度有待进一步的提高,而且算法还是可以进一步优化,在后续的研究中,可以尝试用神经网络等控制方法进行更深入的研究。